中国科学院兰州化学物理研究所固体润滑国家重点实验室材料表界面课题组多年来致力于仿生湿黏滑智能界面的设计与构筑。近日,该课题组成功制备得到具有机械响应自剥离特性的智能壁虎脚黏附材料。研究人员通过耦合表面微结构(蘑菇状硅弹性体)、界面黏附化学(邻苯二酚基湿黏附共聚物胶)和材料机械形变(响应性水凝胶),开发了一种对温敏性仿生多层智能黏附器件(SPSA),动态机械变形诱发界面接触状态变化,进而实现了水下黏附可逆调控。
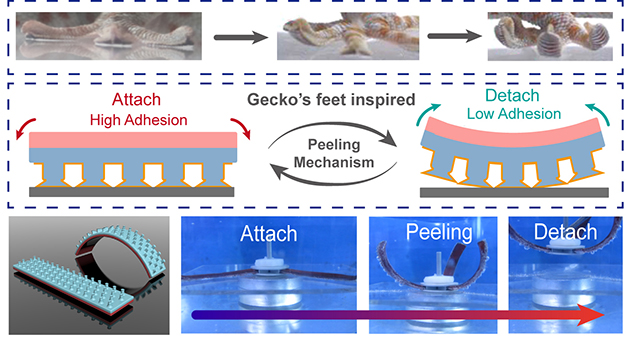
图1. 基于机械响应剥离机制的仿生壁虎脚湿黏附智能器件作业演示图
研究人员通过使用界面软接触黏附力仪测量系统原位表征了SPSA器件与基底表面的动态接触过程,成功捕获到接触界面的裂纹扩展和剥离边界演变过程(图2)。通过黏附力测试与接触力学分析,发现SPSA能够在干态、湿态环境下通过本体材料的机械变形引发的剥离机制实现黏附力的可逆调控。并且,黏附力与形变曲率半径的关系是0.5的标度律,且SPSA可在干态与湿态条件下连续可逆循环使用20次以上。
研究人员将具有光热响应特性的纳米粒子整合到器件中,所设计的器件能够在近红外激光的辐照下成功实现与壁虎脚趾类似的接触贴合、形变剥离、脱附的过程,并用于水下物件的抓取与转移。
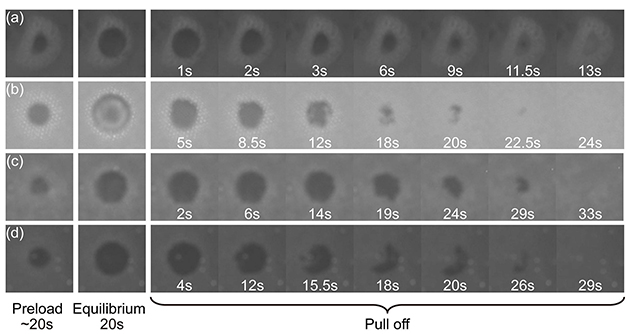
图2. 在干湿条件下的SPSA智能黏附器件在动态加载、平衡和去载过程中的裂纹扩展和剥离边界演变图。
该研究工作以壁虎真实运动形态为仿生出发点,通过将表面微结构、界面化学和机械形变耦合,开发了在外场刺激下具有机械响应自剥离特性的新型仿生壁虎脚器件,为仿生智能黏附和摩擦材料的工程化应用提供了新的设计思路。该工作以“Gecko’s Feet-inspired Self-peeling Switchable Dry/Wet Adhesive”为题发表在Chemistry of Materials (2021, 33, 2785-2795)上,兰州化物所博士生张云雷为第一作者,通讯作者为周峰研究员和麻拴红副研究员。
该研究工作得到了国家自然科学基金、中科院青年创新促进会以及中科院国际合作局对外合作项目的支持,同时也得到了清华大学李小松博士的帮助。
来源:固体润滑国家重点实验室
